
Neues Video zum IRiS-Robotiksystem
Sieh hier ein zusammenfassendes Video des entstandenen IRiS-Robotiksystems des BIBA: https://www.iris-projekt.de/
Sieh hier ein zusammenfassendes Video des entstandenen IRiS-Robotiksystems des BIBA: https://www.iris-projekt.de/
Das Gesamtergebnis des IRiS-Projekts ist ein semi-autonomes System, welches durch den digitalen Zwilling eine neuartige Schnittstelle der Mensch-Technik-Interaktion geschaffen hat und mit einer Arbeitsleistung von ca. 800 Paketen pro Stunde eine 80-prozentige autonome Entladung von Seecontainern erzielt. Die autonome Arbeit des IRiS-Containerentladesystems führt im Normalbetrieb alle Schritte von Erkennen des Paketstapels bis Abfördern der Pakete […]
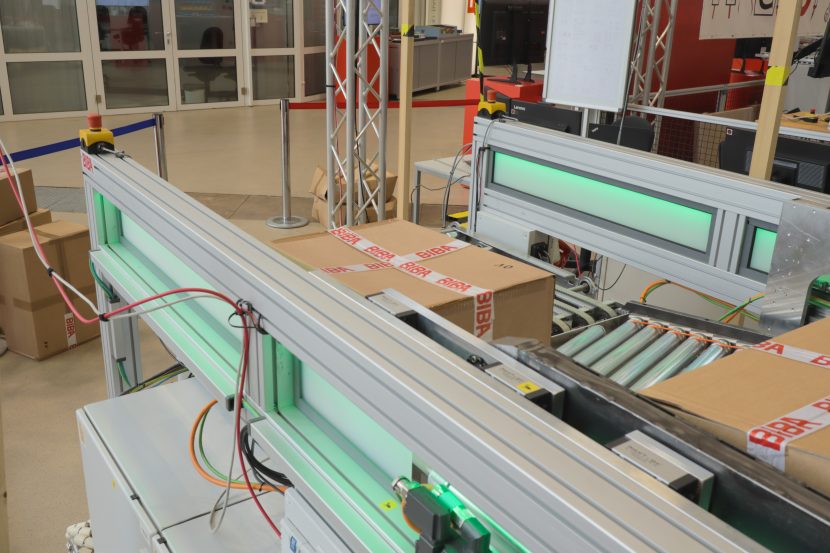
Für eine automatische Entladung des Containers muss das System die Pakete selbstständig erkennen und eine dem Packmuster entsprechende Entladstraregie erstellen, nach welcher dann die Entladung durchgeführt wird. Dazu benötigt das System sogenannte Sauggreifer-Module. Mithilfe einer Vakuumtechnik werden die Pakete festgehalten und aus dem Container gezogen. Wie der Greifer seine Höhe verändern kann und die Sauggreifer […]
Um den Greifer an der Unterkante der einzelnen Paketreihen auszurichten wurde eine Kinematik entwickelt mit der eine Vertikalbewegung und Neigen des Greifers ermöglicht wird. Die Kinematik ist dabei so ausgelegt, dass der Greifer beim Anheben parallel geführt wird und bei Veränderung der Höhe keine Nachjustierung des Systems in Längsrichtung nötig ist. Dadurch kann auf zusätzliche […]

Das steigende Handelsvolumen rückt die Notwendigkeit einer automatischen Entleerung von Seecontainern immer weiter in den Fokus der internationalen Produktion und Logistik. Das BIBA präsentiert in einem neuen Beitrag einen ersten Ansatz zum universalen, automatischen Entleerungsvorgang, unterteilt dabei den Vorgang in fünf Schritte und stellt zehn einflussreiche Parameter vor. Der Einsatz des Roboters ist dabei vielseitig […]

Der digitale Zwilling (DT) wurde vor über 20 Jahren entwickelt und spielt seither und vor allem zukünftig eine große Rolle in der Produktion. In den letzten Jahren wurden zahlreiche Beiträge über die verschiedensten Aspekte des digitalen Zwillings veröffentlicht und das BIBA stellt in seinem Beitrag „Review of the digital Twin-based Interaction in Smart Manufacturing: Enabling […]

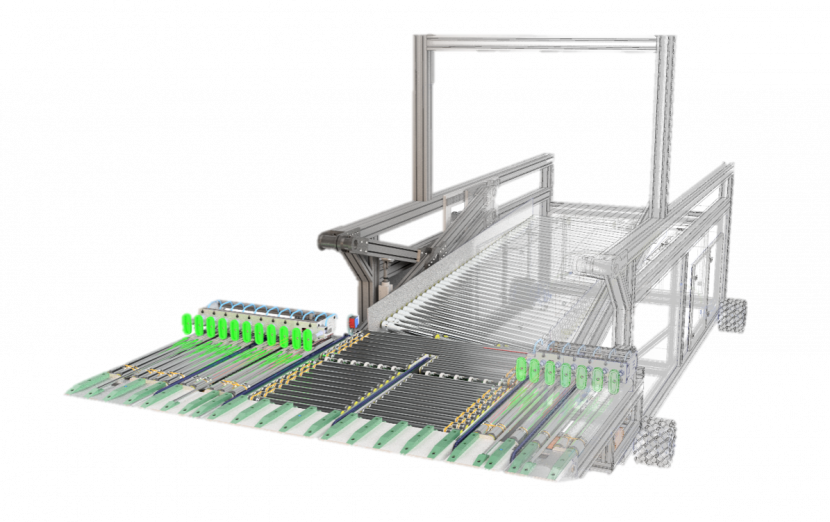
Zur Automatisierung und ergonomischen Verbesserung von Logistikprozessen wird der neuartige, mobile Roboter des IRiS-Projekts vorgestellt. Ohne große Anpassungen an die vorhandene betriebliche Infrastruktur kann der Roboter innerhalb kürzester Zeit zur Enladung eingesetzt werden. Durch diese intuitive Schnittstelle können Mitarbeiter die korrekte Funktionsweise des Roboters überwachen und bei Störungen eingreifen, sodass kostenintensive Systemstillstände vermieden werden können. […]

Eine Kernkompetenz des BIBA stellt die Automatisierung und Unterstützung unergonomischer und anstrengender Tätigkeiten in unterschiedlichen industriellen Anwendungsszenarien dar. In diesem Kontext forscht und entwickelt das BIBA unter anderem an Automatisierungslösungen zur Entladung von Seecontainer, welche bisher in der Regel manuell und körperlich höchst anspruchsvoll erfolgt. Ein mobiler Roboter soll Abhilfe schaffen, um den Menschen zu […]

Durch diese Art der Steuerung sind Eingriffe auf unterschiedlichen Ebenen der Informationsverarbeitung möglich, sodass das Bedienpersonal bei Bedarf und mit entsprechender Berechtigung sowohl Modellparameter, die Entscheidungsheuristik, die Entscheidungen an sich oder die direkten Bewegungen beeinflussen kann. Damit lassen sich Ergebnisse aus der Systemsimulation oder der Entscheidungsheuristik korrigieren und folglich das kurzfristige Verhalten ändern. Zur Modifizierung […]

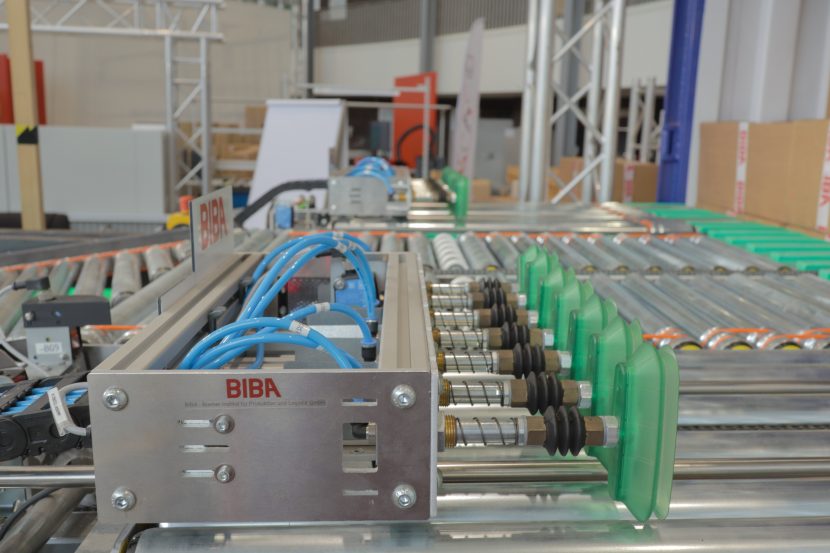
Nach dem Positionieren des Greifers kann dieser die Pakete einer Reihe greifen, aus der Lage ziehen und auf der Fördertechnik ablegen. Hierzu wurde der dargestellte Greifer entwickelt, der eine komplette Reihe von Paketen in einem Schritt aus der Lage entnehmen kann und das System vom Stand der Technik abhebt. Der Greifer besteht aus drei einzelnen […]