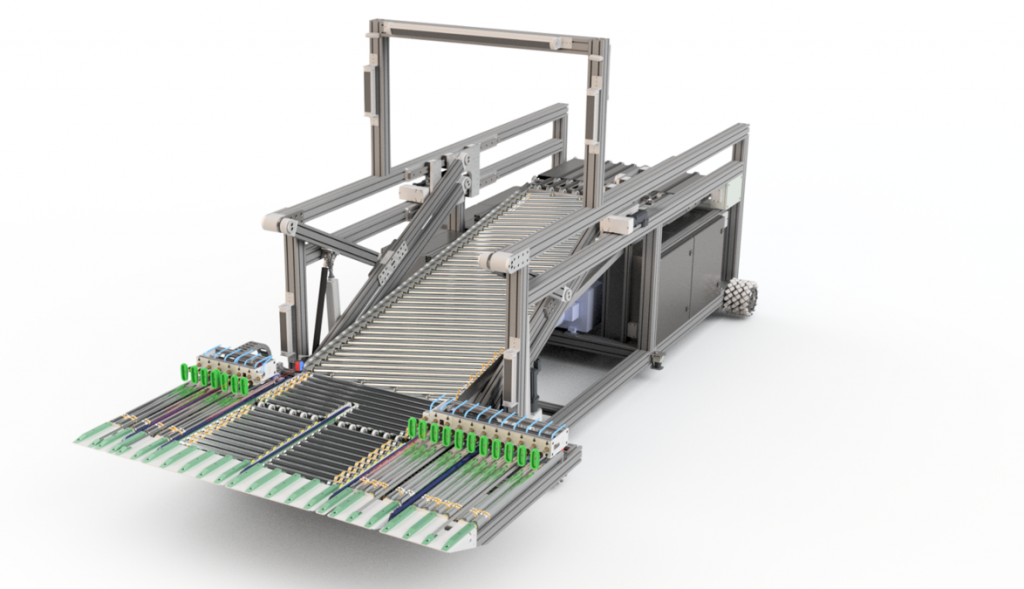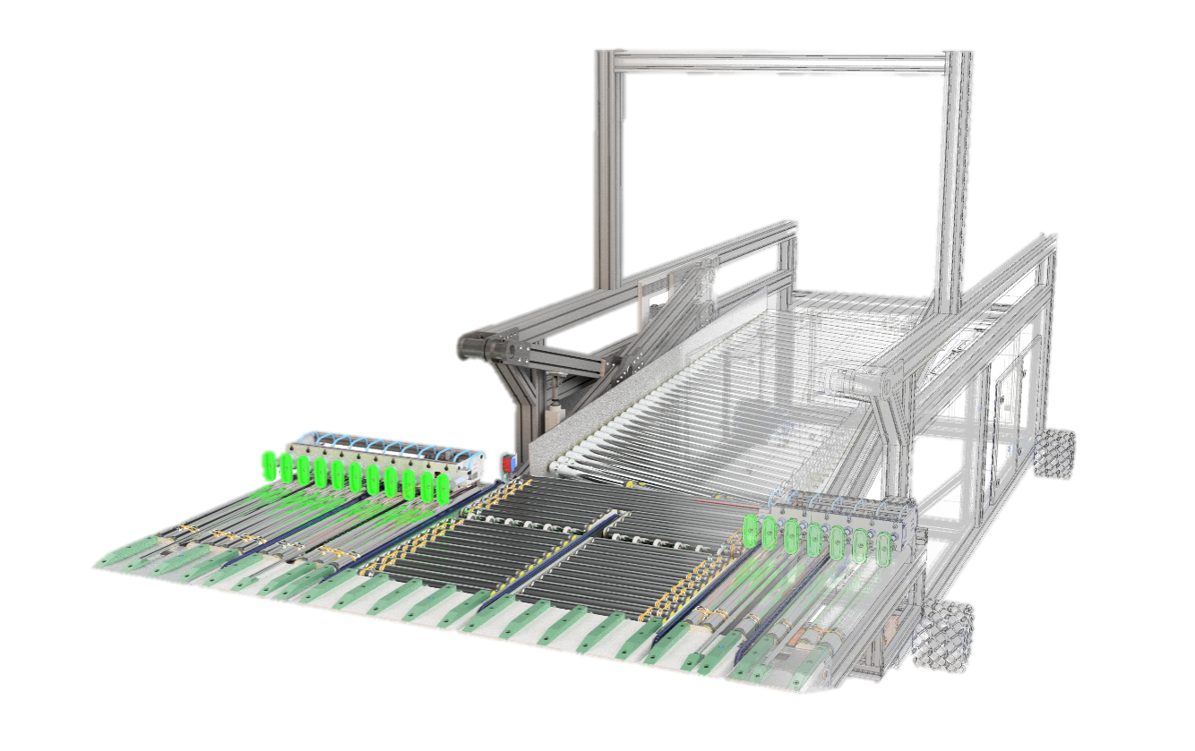
Um den Greifer an der Unterkante der einzelnen Paketreihen auszurichten wurde eine Kinematik entwickelt mit der eine Vertikalbewegung und Neigen des Greifers ermöglicht wird. Die Kinematik ist dabei so ausgelegt, dass der Greifer beim Anheben parallel geführt wird und bei Veränderung der Höhe keine Nachjustierung des Systems in Längsrichtung nötig ist. Dadurch kann auf zusätzliche Aktuatoren verzichtet werden und auch die Komplexität der Steuerung wird reduziert, was sich positiv auf die Robustheit des Systems auswirkt.
Neben der Veränderung der Höhe ist es auch möglich die Neigung des Greifers zu verändern, um Pakete am Boden des Containers aufzunehmen oder einen Winkelversatz auszugleichen, der sich durch das Hineinfahren über eine Überladebrücke ergeben kann oder durch örtliche Gegebenheiten, wie z.B. Tiefenrampen auftritt.
Du möchtest genauere Details über die Containerentladung erfahren? Unter dem Reiter “Veröffentlichungen” kannst du alle aktuellen Publikationen lesen.