Für eine automatische Entladung des Containers muss das System die Pakete selbstständig erkennen und eine dem Packmuster entsprechende Entladstraregie erstellen, nach welcher dann die Entladung durchgeführt wird. Dazu benötigt das System sogenannte Sauggreifer-Module. Mithilfe einer Vakuumtechnik werden die Pakete festgehalten und aus dem Container gezogen. Wie der Greifer seine Höhe verändern kann und die Sauggreifer nach vorn- bzw. nach hinten bewegt, siehst du in den folgenden Videos.
Der ganze Prozess der Containerladung ist in sechs große Schritte unterteilt. Zu den Schritten eins und zwei gehöhrt sowol die Identifzierung des Parketstapels als auch das Annähern und die Positionierung des Systems. In den Schritten drei bis fünf kommt das vorgestellte Sauggreifermodul zum Einsatz.
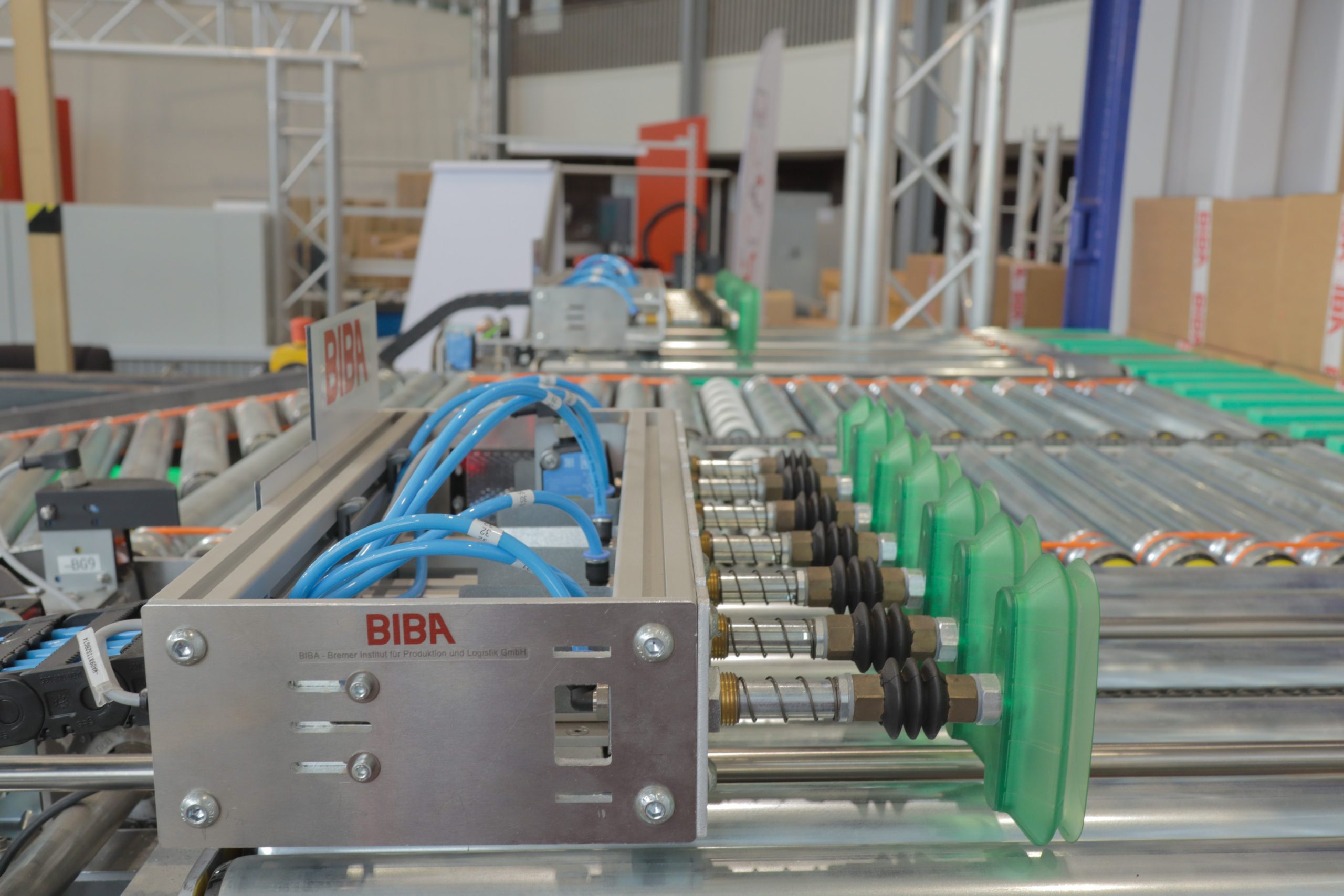
Nach Positionieren des Greifers kann dieser die Pakete einer Reihe greifen, aus der Lage ziehen und auf der Fördertechnik ablegen. Der Greifer besteht aus drei einzelnen Segmenten, die wiederum mehrere Vakuumsauger zusammenfassen und ermöglichen dem Greifer somit sogar eine komplette Paketreihe in einem Schritt aus der Lage zu entnehmen. Zum Greifen der Pakete werden die Segmente nach vorne gefahren. Basierend auf dem identifizierten Packmuster und der abgeleiteten Entladestrategie werden dann die einzelnen Sauggreifer individuell aktiviert um entweder einzelne Pakete oder die gesamte Paketreihe aus der Lage zu greifen.
Anschließend werden die Pakete herausgezogen und durch das Unterbrechen des Vakuums auf den Förderrollen abgelegt. Die Segmente werden dann in ihre Ausgangslage zurückbewegt, sodass die nächsten Pakete aus dem Container entladen werden können.