
New video about the IRiS robotic system
Check out a summarizing video of BIBA's resulting IRiS robotic system here.
Check out a summarizing video of BIBA's resulting IRiS robotic system here.
The overall result of the IRiS project is a semi-autonomous system that has created a novel interface of human-technology interaction through the digital twin and achieves 80 percent autonomous unloading of sea containers with a working capacity of about 800 packages per hour. In normal operation, the autonomous work of the IRiS container unloading system carries out all steps from recognizing the package stack to conveying the packages [...]
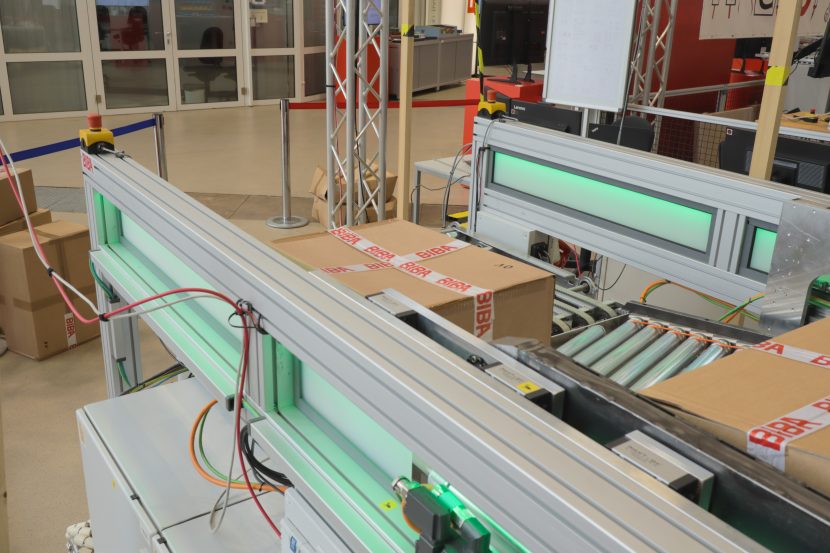
For automatically unloading the container, the system must identify the packages independently and create an unloading strategy corresponding to the packing pattern, according to which the unloading is then carried out. For this purpose, the system requires so-called suction gripper modules. With the help of vacuum technology, the packages are held and pulled out of the container. The following videos show how the gripper can change its height and move the suction grippers forwards or backwards.
In order to align the gripper with the bottom edge of the individual rows of packages, kinematics were developed to enable vertical movement and tilting of the gripper. The kinematics are designed in a way that the gripper is guided in parallel during lifting and no re-adjustment of the system in longitudinal direction is necessary when changing the height. This means that additional [...]

The increasing trade volume pushes the need for automatic emptying of sea containers more and more into the focus of international production and logistics. In a new paper, BIBA presents a first approach to universal, automatic emptying, dividing the process into five steps and introducing ten influential parameters. The use of the robot is versatile [...].

The digital twin (DT) was developed more than 20 years ago and has played a major role in manufacturing since then and especially in the future. In recent years, numerous articles have been published on various aspects of the digital twin and BIBA presents in its article "Review of the digital Twin-based Interaction in Smart Manufacturing: Enabling [...]

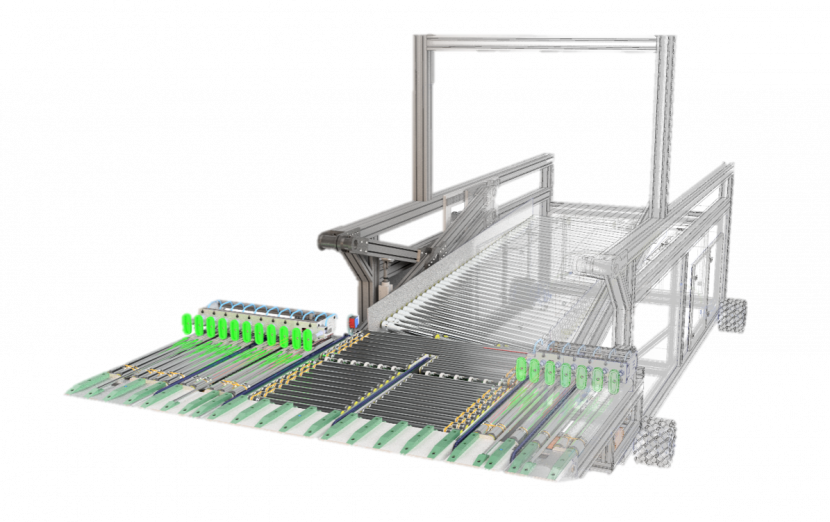
The novel, mobile robot of the IRiS project will be presented for the automation and ergonomic improvement of logistics processes. Without major adaptations to the existing operational infrastructure, the robot can be used for unloading within a very short time. Through this intuitive interface, employees can monitor the correct functioning of the robot and intervene in case of disruptions, thus avoiding cost-intensive system stoppages. [...]

One of BIBA's core competencies is the automation and support of unergonomic and strenuous activities in various industrial application scenarios. In this context, BIBA is researching and developing, among other things, automation solutions for unloading sea containers, which has usually been done manually until now and is highly physically demanding. A mobile robot intends to provide a solution to this problem in order to [...]

This type of control allows interventions at different levels of information processing, so that the operator can influence model parameters, the decision heuristics, the decisions themselves or the direct movements if necessary with the appropriate authority. This allows results from the system simulation or the decision heuristics to be corrected and consequently the short-term behaviour to be changed. To modify the long-term behaviour, parameters in the models or the decision heuristics can be adjusted ("parameter change").

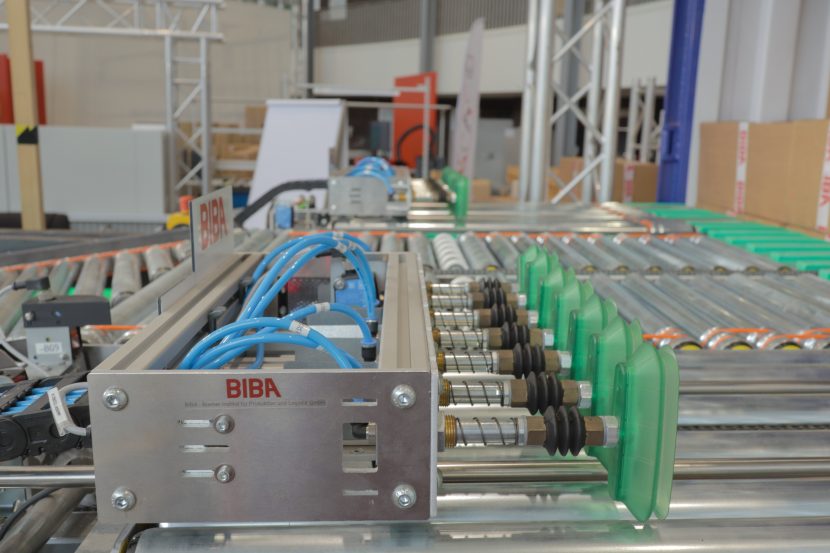
After the gripper has been positioned, it can grab the bundles of a row, pull them out of the layer and deposit them on the conveyor system. For this purpose, the presented gripper was developed, which can remove a complete row of bundles from the layer in one step and sets the system apart from the state of the art. The gripper consists of three individual [...]